Member-only story
An Easy Explanation of Kalman Filter
The Kalman Filter for object tracking predicts the system's future state based on past measurements.
You are traveling from home to office on a beautiful Monday morning; you enter your destination as your office address into your maps apps. The app predicts traffic flow on a real-time basis to tell you the quickest path to reach the office.
Ever wondered what goes behind the scenes!
The complicated task of traffic state prediction is performed using the Kalman Filter for both stationary and non-stationary traffic conditions.
The filter is named after Rudolf E. Kálmán (May 19, 1930 — July 2, 2016). In 1960, Kálmán published his famous paper on the Kalman Filter, an optimal estimation algorithm.
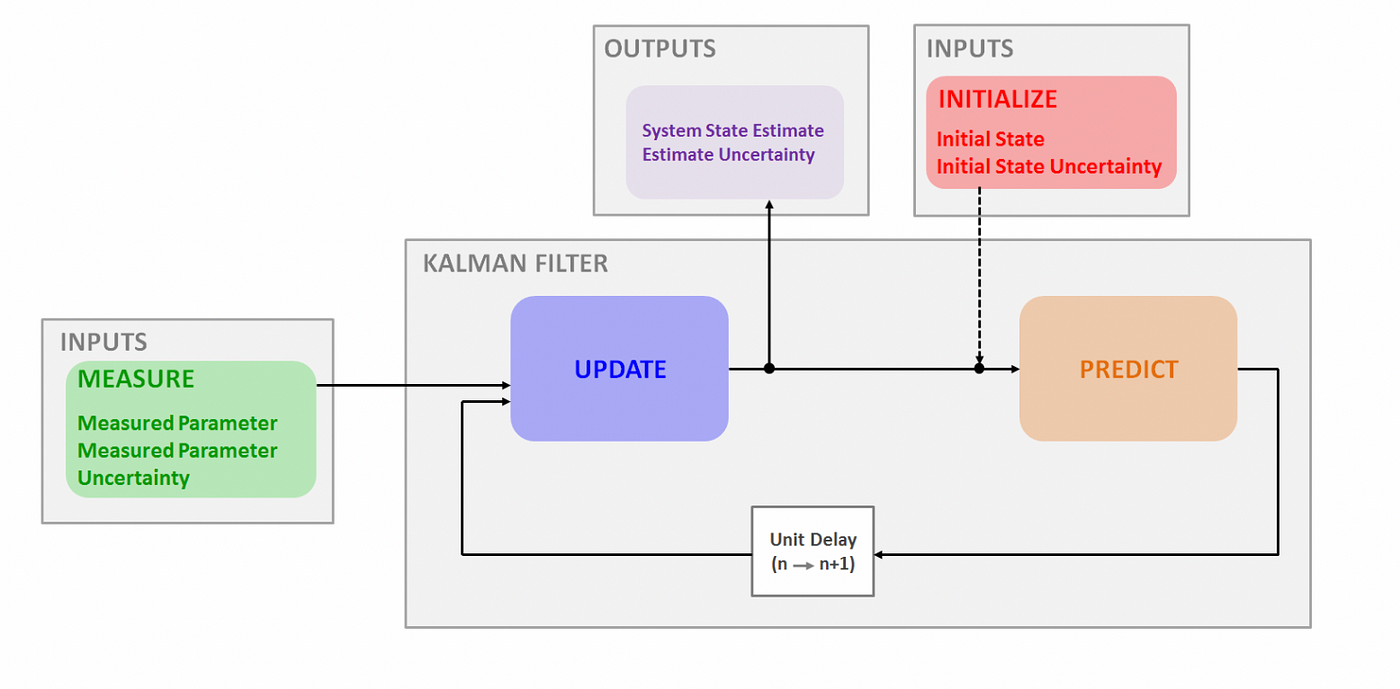
The Kalman filtering is a relatively simple state-space algorithm to produce estimates of the hidden variables based on uncertain and inaccurate measurements. It predicts the systems future state based on past estimations.
Kalman Filter is applied to model systems with multiple noisy inputs and outputs hopefully less noisy and more accurately estimated output data. It is applicable to stationary and non-stationary situations.
Kalman Filter is a filter to find the best estimate from noisy input data by filtering out the noise. Kalman filter projects the data measurements onto the state estimate.
Usage of Kalman Filter
The Kalman filter is used to
- Track objects like missiles or people based on their current measured position to more accurately estimate their position and velocity in the future.
- Navigation systems utilize sensor output from an inertial measurement unit (IMU) and a global navigation satellite system (GNSS) receiver as input to estimate the vehicle state, position, and velocity.
- Computer vision applications for feature tracking or cluster tracking
Intuitive Explanation of the Kalman Filter